In the rapidly advancing field of robotics, teaching robots to learn and adapt through human demonstrations is an exciting frontier. The LeRobot project, spearheaded by Hugging Face, is at the cutting edge of this effort, leveraging imitation learning to make robotics more accessible to researchers, developers, and enthusiasts. In this post, we dive into what LeRobot is all about, how it works, and why it’s a game-changer for open-source robotics.
What is LeRobot?
LeRobot is an open-source initiative developed by Hugging Face with the goal of democratizing robotics through imitation learning. The project focuses on training robotic arms to learn tasks by observing human demonstrations, effectively bridging the gap between artificial intelligence and physical robotic systems.
LeRobot aims to empower the robotics community with tools, datasets, and models to accelerate development and experimentation. By leveraging open-source software, it removes barriers for individuals and organizations looking to explore robotics, regardless of their budget or hardware capabilities.
🚀 Key Goals of the LeRobot Project
The LeRobot project is driven by a few central goals:
- Accelerating Robotics Research: Providing pre-trained models and open-source datasets to speed up research and development.
- Imitation Learning for Robotics: Allowing robots to learn by observing human actions, making it easier to train robots for complex, real-world tasks.
- Lowering Entry Barriers: Offering resources that make it easier for new developers to experiment with robotics without needing expensive hardware setups.
How Does LeRobot Work?
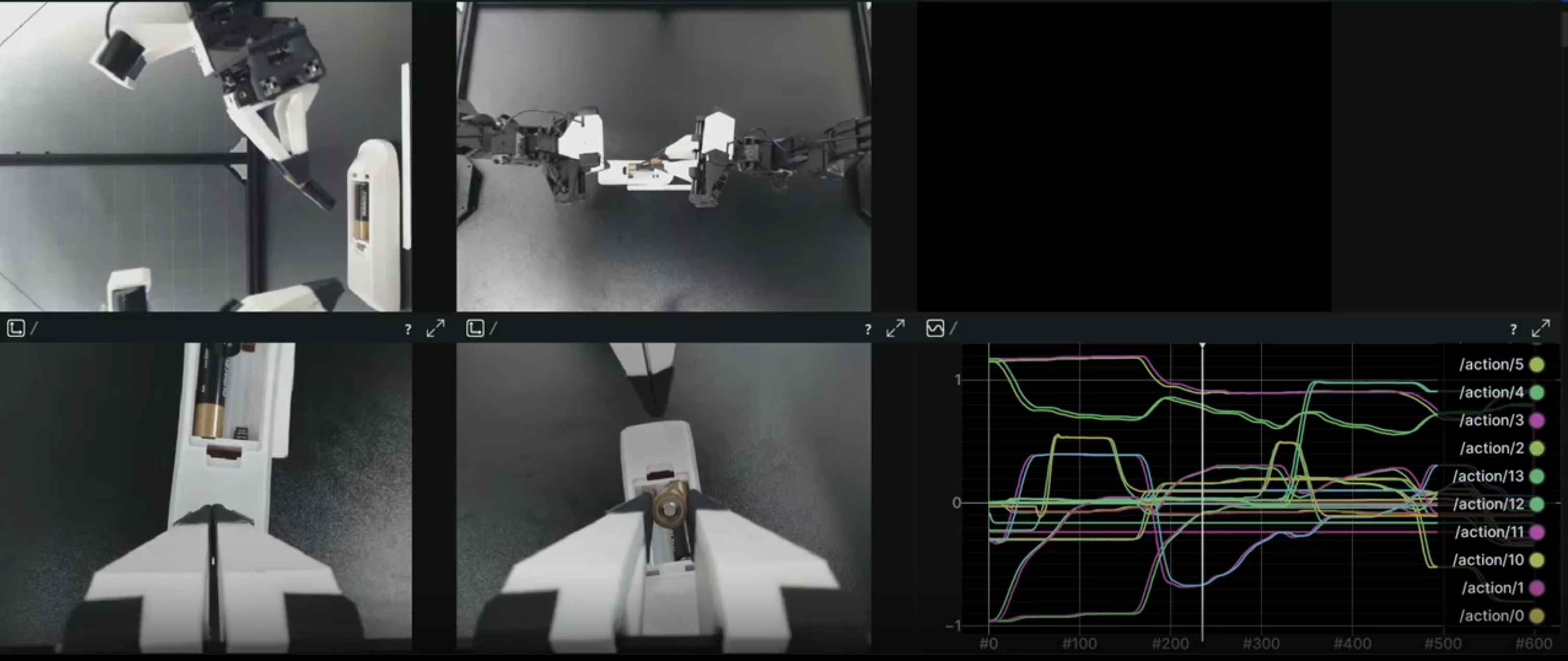
LeRobot uses imitation learning, a type of machine learning where robots learn to perform tasks by observing human demonstrations. This approach mimics how humans learn by watching others, making it an efficient method for training robots to handle tasks that involve dexterity and precision.
Core Components:
- Pre-trained Models: LeRobot provides a collection of models that are already trained to perform common tasks, such as object manipulation, sorting, and assembly.
- Human Demonstration Datasets: The project includes a vast dataset of human demonstrations, which is crucial for training robots using imitation learning.
- Simulation Environments: LeRobot uses simulation environments like PyBullet and Gazebo to test and refine models before deploying them to physical robots.
🔧 Technical Features
Here’s a breakdown of some of the standout technical features of LeRobot:
- Integration with Hugging Face Hub: LeRobot leverages the Hugging Face Model Hub, allowing users to access and share pre-trained models and datasets with the robotics community.
- Open-Source Framework: Built on open-source technologies, making it accessible to anyone with a passion for robotics and AI.
- Support for ROS (Robot Operating System): Fully compatible with ROS, enabling seamless integration with existing robotic platforms.
- Simulation Support: Provides support for popular simulation tools, allowing users to test models in a controlled virtual environment before moving to physical robots.
🌐 Collaboration with NVIDIA
In a recent announcement, Hugging Face partnered with NVIDIA to take LeRobot to the next level. This collaboration focuses on combining Hugging Face’s open-source models with NVIDIA’s AI and robotics technologies. By leveraging the power of NVIDIA’s GPUs and robotics frameworks, LeRobot aims to enhance the performance and scalability of its robotic learning models.
🛠️ Getting Started with LeRobot
Here’s how you can get started with the LeRobot project:
- Clone the Repository:
- Install Dependencies: Make sure you have Python 3.8+, PyTorch, and ROS installed.
- Run the Simulation: Launch the simulation to start experimenting with imitation learning models:
For detailed setup instructions, visit the LeRobot GitHub Repository.
Practical Applications of LeRobot
The potential use cases for LeRobot are vast and varied:
- Manufacturing: Training robotic arms to handle assembly line tasks.
- Healthcare: Teaching robots to assist in delicate procedures where precision is crucial.
- Logistics: Automating sorting and packing processes using imitation learning.
- Education: Offering students hands-on experience in robotics through open-source tools.
📈 The Future of Robotics with LeRobot
The LeRobot project is an exciting step toward making robotics more accessible and flexible. By using imitation learning, robots can learn faster and more efficiently, reducing the need for extensive manual programming. The open-source nature of the project encourages collaboration and innovation, helping to push the boundaries of what’s possible in robotics.
Build Your Own

Parts For Two Arms (Standard Teleoperation Setup:
| Part | Amount | Unit Cost (US) | Buy US |
|---|---|---|---|
| STS3215 Servo1 | 12 | $15 | Alibaba or Amazon |
| Motor Control Board | 2 | $11 | Amazon |
| USB-C Cable 2 pcs | 1 | $7 | Amazon |
| Power Supply2 | 2 | $10 | Amazon |
| Table Clamp 4pcs | 1 | $18 | Amazon |
| Screwdriver Set3 | 1 | $6 | Amazon |
| Total | — | $241 | — |